![]()
Work with Lining Yao, James McCann, and Scott E. Hudson
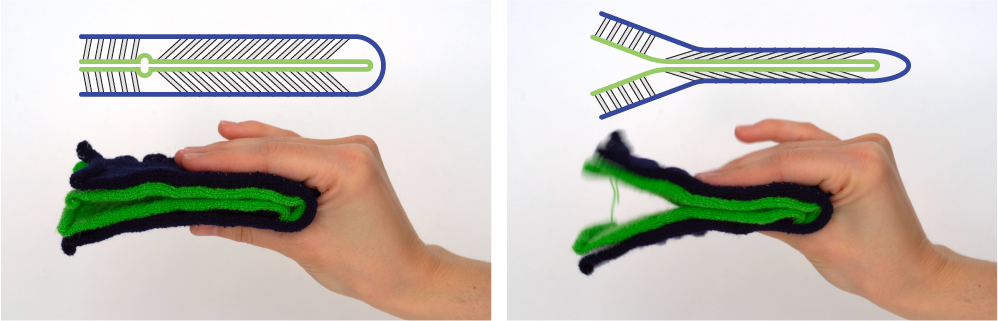
Machine knitting is an increasingly accessible fabrication technology for producing custom soft goods. However, recent machine knitting research has focused on knit shaping, or on adapting hand-knitting patterns. We explore a capability unique to machine knitting: producing multilayer spacer fabrics.
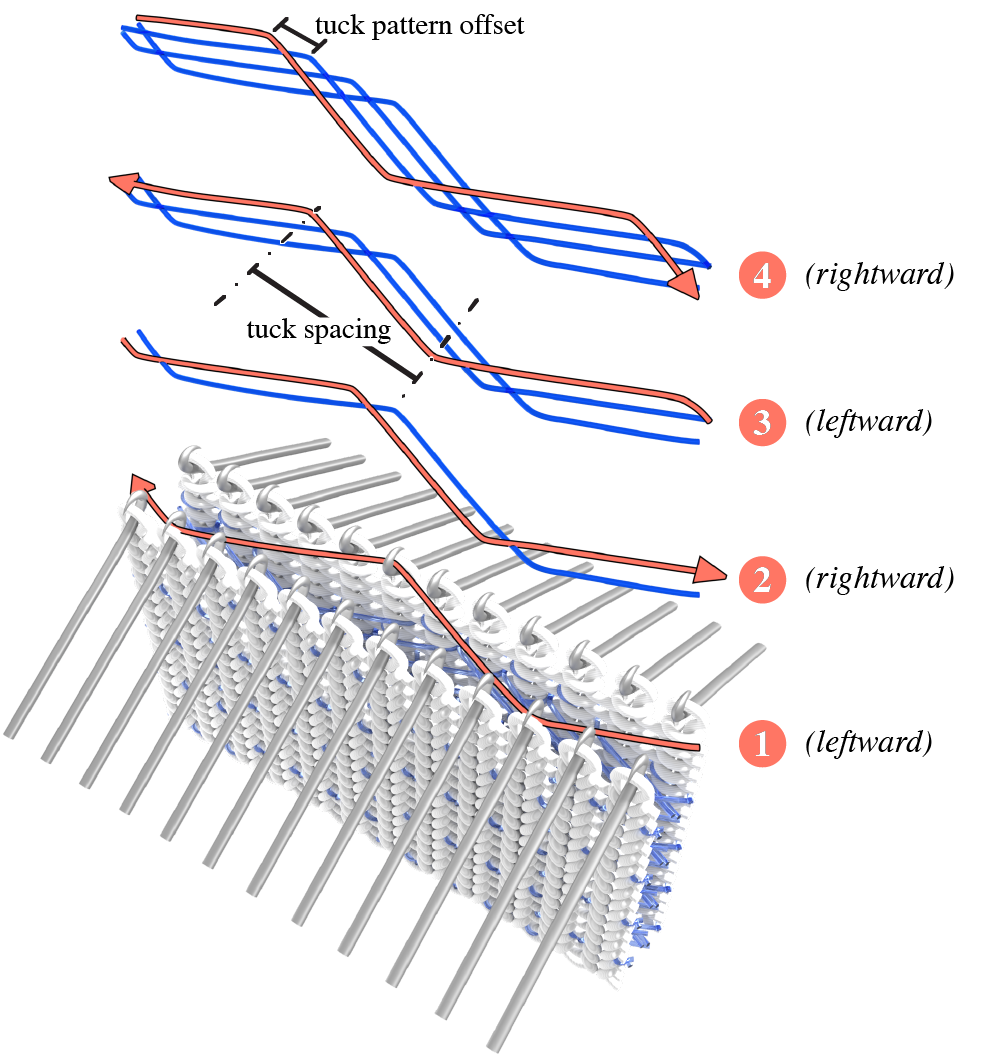
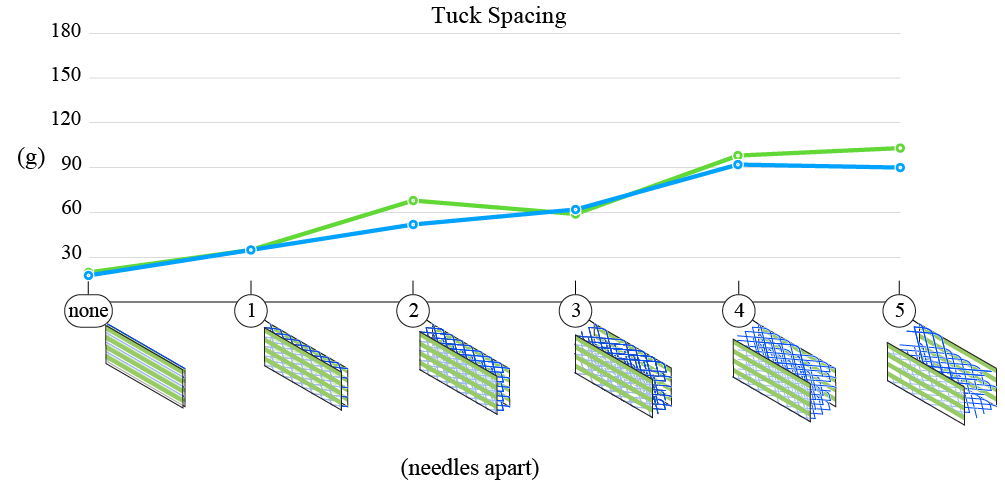
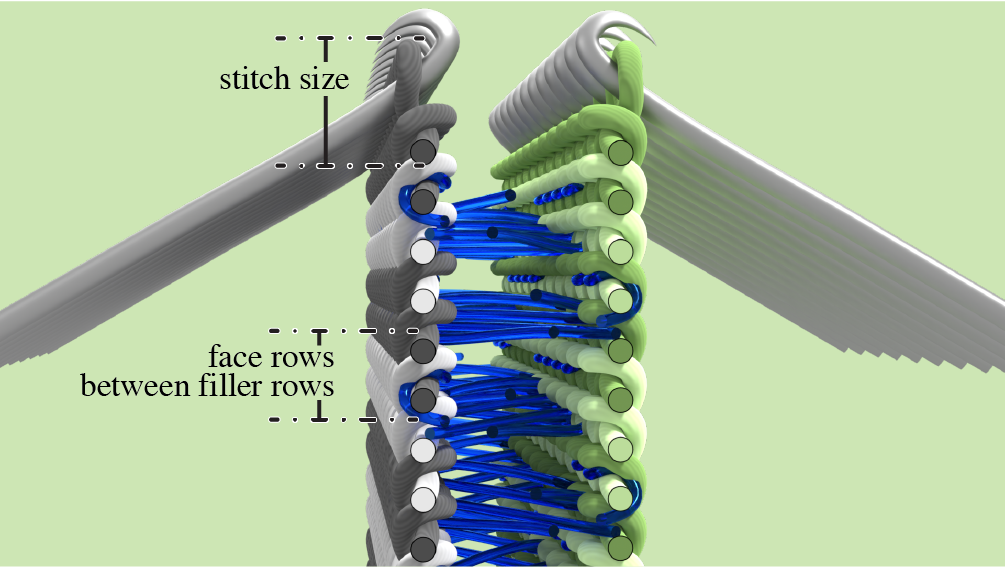
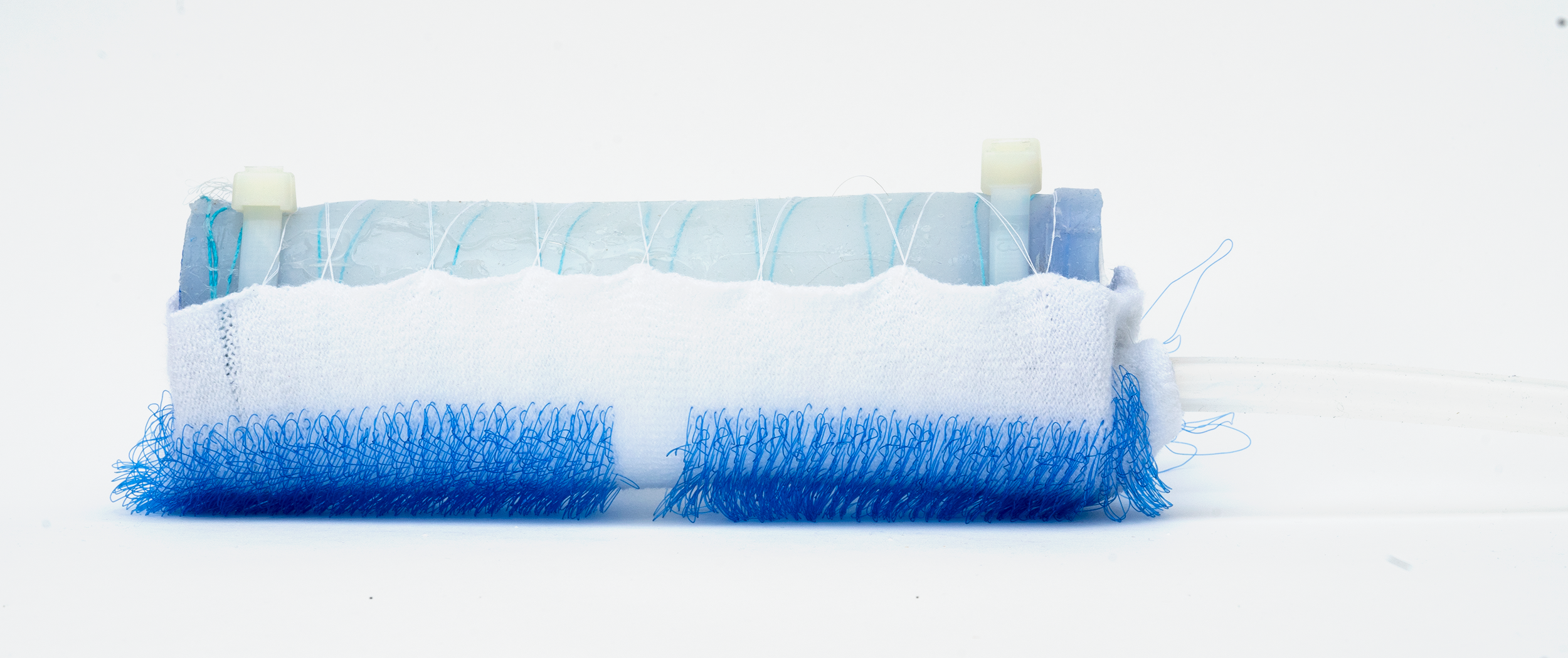
These fabrics consist of two face layers connected by a monofilament filler yarn which gives the structure stiffness and volume. We show how to vary knit patterning and yarn parameters in spacer fabrics to produce tactile materials with embedded functionality for forming soft actuated mechanisms and sensors with tunable density, stiffness, material bias, and bristle properties. These soft mechanisms can be rapidly produced on a computationally-controlled v-bed knitting machine and integrated directly into soft objects.
Published and presented at CHI 2021 (Best Paper Honorable Mention).